Published by: Neha Khadka
Published date: 25 Jul 2024

Noise model-based restoration focuses on identifying the type and characteristics of noise in an image and applying appropriate techniques to reduce or remove this noise. Here's a detailed look at this process.
Gaussian Noise: Common in natural photographs, defined by a normal distribution of noise levels.
Salt-and-Pepper Noise: Manifests as sporadic black and white pixels.
Poisson Noise: Usually present in low-light environments, this noise is caused by variations in photon detection.
Speckle Noise: Multiplicative noise that frequently interferes with coherent imaging technologies like radar and ultrasonography.
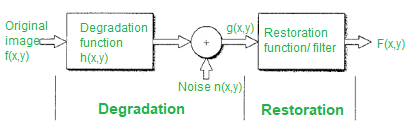
Processing usually involves using a mathematical model of image deterioration and restoration. The degradation function h(x,y) and the external noise component n(x,y) that enter the original image signal f(x,y) are depicted in the following figure. This results in the final degraded image g(x,y). The deterioration model is comprised of this portion. We can write the following mathematically.
g(x,y) = h(x,y) *f(x,y)+ n(x,y)
Where * indicates convolution in the spatial domain.
Getting a near replica F(x,y) of the original image is the aim of the restoration filter or restoration function.
Numerous noise models are commonly employed in the field of digital image processing, and the external noise is probabilistic in nature. The noise's probability density functions come in multiples.